ベルトを用いた伝動系を理解する場合に有効な理論として,Eularの摩擦伝動理論は古典的ではありますが,非常に有用です.
ベルトに張力
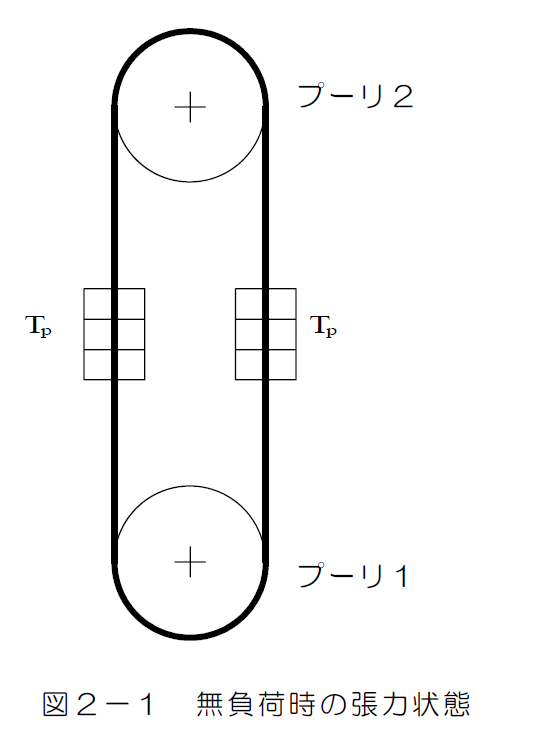 この状態でベルトを回転させても,軸受などでエネルギ損失がなければ,理論的には二つのプーリ間で動力は伝達されない.
この状態でベルトを回転させても,軸受などでエネルギ損失がなければ,理論的には二つのプーリ間で動力は伝達されない.
図2-1は無負荷伝動の状態を静止状態に模擬して示したものである.今,原動プーリに負荷を与えると,二つのプーリをつなぐベルト間に張力差が生じる.
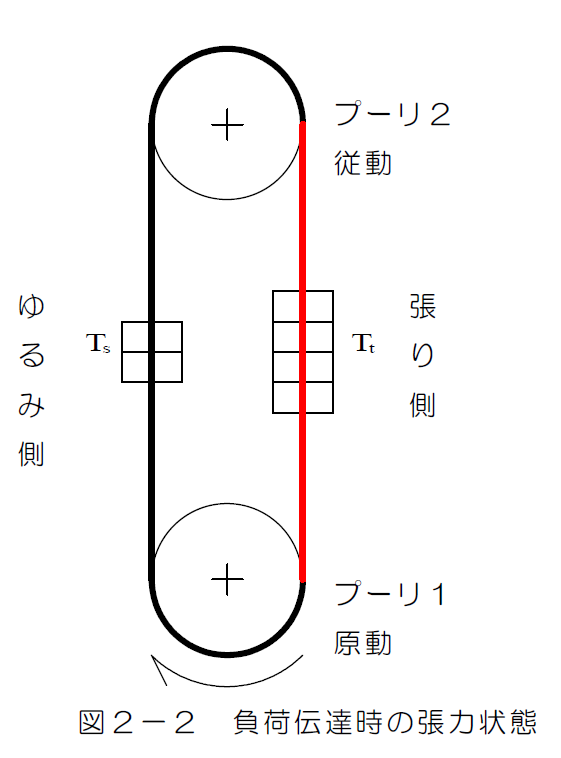
図2-2は,動力が伝えられている状態を模擬して示す.従動プーリに負荷が加わると


 取り付けられた状態での張力
取り付けられた状態での張力


今,プーリ上でのベルト張力の変化について考える.摩擦伝動ベルトの最も基本的な式としてEulerの式(Einterweinの式とも呼ばれる)がある.この式は使用されるパラメータを少なく簡単であるため,平ベルト,Vベルト,Vリブドベルトを問わず,現在でも摩擦伝動ベルトの設計計算を行う上で広く用いられている.このEulerの式は,ベルトとプーリ間の力の伝達を次のような仮定に基づいて導く.
- ベルト,プーリ間の摩擦係数は一定である.
- ベルトはプーリ径に対して十分薄いものとする.すなわち,ベルトの曲げ変形による作用は考えない.
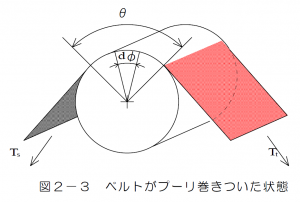
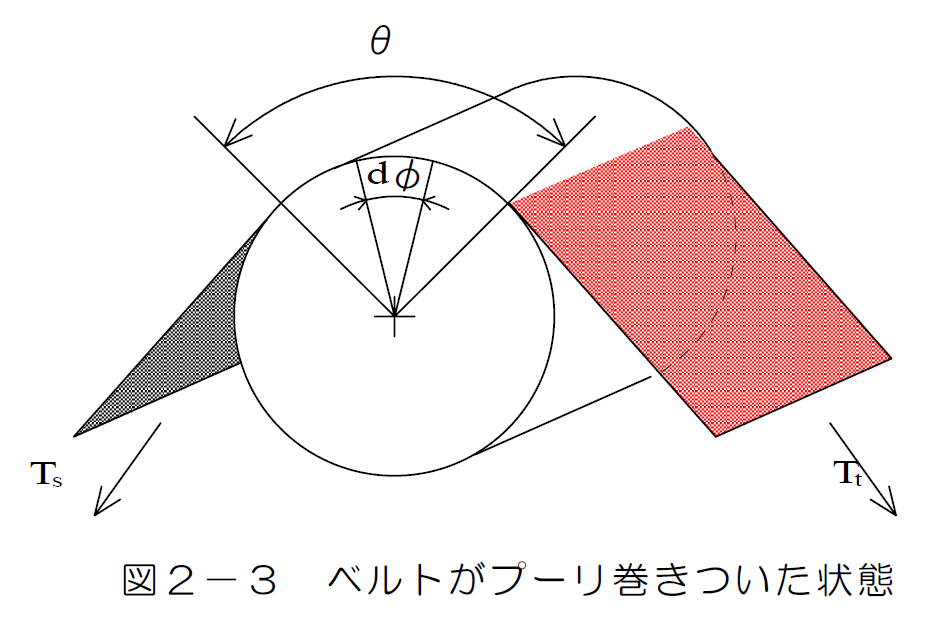
図2-3は,角速度



図2-4は,その微小ベルト要素に作用する力を図示したものである.微小ベルト要素にはベルト張力




+(T+dT)sin(\frac{d\phi}{2})-mv^2d\phi")
+dTsin(\frac{d\phi}{2})-mv^2d\phi")
ここで,




 = \frac{d\phi}{2}")

d\phi")
ベルト・プーリ間の最大摩擦係数を

図2-4でプーリ円周方向の力のつり合いを考えると,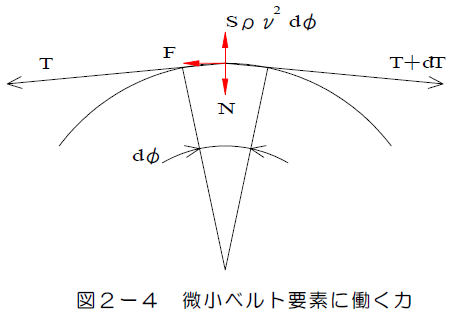
-T\}cos(\frac{d\phi}{2})-F=0")
が得られる.式(2-3)および式(2-4)を式(2-5)に代入すると,
=\mu(T-mv^2)d\phi")
となる.=1")
d\phi")
即ち,

これを積分して,
\ln{(T-mv^2)}+C")
ここで,


 m v^2")
また,




")
今,有効張力を
張り側張力

ゆるみ側張力

上式で,