| タイミングベルトを使用した加工機の位置決め精度はどのぐらいなのでしょうか?また、繰り返し位置決めの精度を高めるためにはどのような点に留意する必要があるのでしょうか? |
 | 負荷が少ないとのことですので,無負荷時に限定させていただきます.まず,歯付ベルトの回転伝達精度の基本となります2軸における回転むら(原動プーリ回転角に対する従動プーリ回転角の進み遅れであり,この挙動によって従動プーリにズレが生じます.)について,文献による実験結果に基づき回答します.実験に使用したベルトは,L形(公称ピッチ = 9.525 mm)のクロロプレンゴム製で歯数72,ベルト幅20mm,プーリ歯数は18を使用しています.一般に,回転むらは,1ピッチ,プーリ1回転,ベルト1周の周期が合成されて発生します. 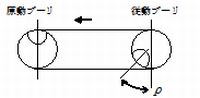
(文献1)~(文献3)に述べました実験はL形(台形歯形)での結果です.しかし,最近は円弧歯形が主流です.円弧歯形を使用すると多角形作用による回転むらの発生はなくなり,上記の回転むらの値よりもさらに少なくなります.また,1方向のみの回転では,はすば歯付ベルトを使用すれば回転むらや騒音の低減に効果があります.ご使用の際には,ベルトメーカにご相談ください. 次に,原動プーリの回転に伴うかみ合い始めのベルトの動き(クランプ部のズレ)について(文献4),簡単に回答します.上記と同様なベルトとプーリを使用した場合の1ピッチを周期とするベルトの移動誤差 回転むらやベルトの移動誤差は取付張力の影響を大きく受けます.ベルトの走行時間とともに取付張力が変化しますので,取付張力を一定に管理するためにテンションプーリ等の取付けをお勧めします. 回転伝達精度は,歯付ベルトの選定内容やレイアウト等の機構(設計)によって異なりますので,具体的なデータにつきましてはベルトメーカにご相談ください.また,歯付ベルト式のXYZ送り方式は,市場での実績は多いと考えられます.XYZプロッタメーカのカタログ・資料には,原動軸のレイアウト(2軸方式かオメガドライブ方式か等)や一般的な精度が記載されていると思われますので,設計の際にそのようなことも参考にして頂ければ良いと思います. |
 (文献1)
(文献1) radの場合,発生しません.ピッチ差とは,張力作用前のベルトピッチからプーリピッチを差し引いた値です.
radの場合,発生しません.ピッチ差とは,張力作用前のベルトピッチからプーリピッチを差し引いた値です. ピッチ角のとき,
ピッチ角のとき, radです.ピッチ円上に換算すると,約0.011mmです.従って,ベルト歯数とプーリ歯数は偶数を用い
radです.ピッチ円上に換算すると,約0.011mmです.従って,ベルト歯数とプーリ歯数は偶数を用い (文献2)
(文献2) rad(ピッチ円上で約0.019mm)です.プーリに偏心がある場合,
rad(ピッチ円上で約0.019mm)です.プーリに偏心がある場合, (文献3)
(文献3) mrad(ピッチ円上で約0.027~0.08 mm)でした.この回転むらをユーザが減少させることは困難ですが,ベルト幅を広くすることで,抗張体の本数が増えベルト1周の弾性係数をより均一化でき,
mrad(ピッチ円上で約0.027~0.08 mm)でした.この回転むらをユーザが減少させることは困難ですが,ベルト幅を広くすることで,抗張体の本数が増えベルト1周の弾性係数をより均一化でき, は,0.01 mm~0.02 mmです.
は,0.01 mm~0.02 mmです.【参考文献】
- 籠谷・會田・小山・佐藤・保城,日本機械学会論文集,歯付ベルトの回転伝達特性に関する研究(第3報,初張力作用時の回転伝達誤差・実験結果),48巻435号C編(1982),pp.1806-1814.
- 籠谷・小山,日本機械学会論文集,偏心プーリを持つ歯付ベルトの回転伝達特性に関する研究(プーリの偏心位相角,ベルト幅などの影響),56巻527号C編(1990),pp.1914-1920.
- Kagotani, Koyama, and Ueda, Transactions of the ASME, Journal of Mechanical Design, A Study on Transmission Error in Timing Belt (Effect of Production Error in Polychloroprene Rubber Belt), Vol. 115, December (1993), pp. 1038-1043.
- 籠谷・會田・小山・佐藤・保城,日本機械学会論文集,歯付ベルトの回転伝達特性に関する研究(第5報,初張力作用時の正逆回転時におけるベルト移動誤差),51巻466号C編(1985),pp.1354-1361.
 6 人が参考になったと評価しました
6 人が参考になったと評価しました